¡Ven a las piscinas de 42!
Abrimos nuevas fechas para que puedas descubrir una formación 100% gratuita, presencial y a tu ritmo que te prepara para las profesiones digitales más demandadas en el mercado laboral. ¿Te apuntas?
Más info


promoviendo proyectos con alma digital para lograr una sociedad más justa e inclusiva
Abrimos nuevas fechas para que puedas descubrir una formación 100% gratuita, presencial y a tu ritmo que te prepara para las profesiones digitales más demandadas en el mercado laboral. ¿Te apuntas?
Más info
Descarga ya el informe que recoge las principales claves de la sexta edición de enlightED 2023, la gran conferencia sobre educación impulsada por Fundación Telefónica junto con IE University, South Summit y Fundación ”la Caixa”.
Más info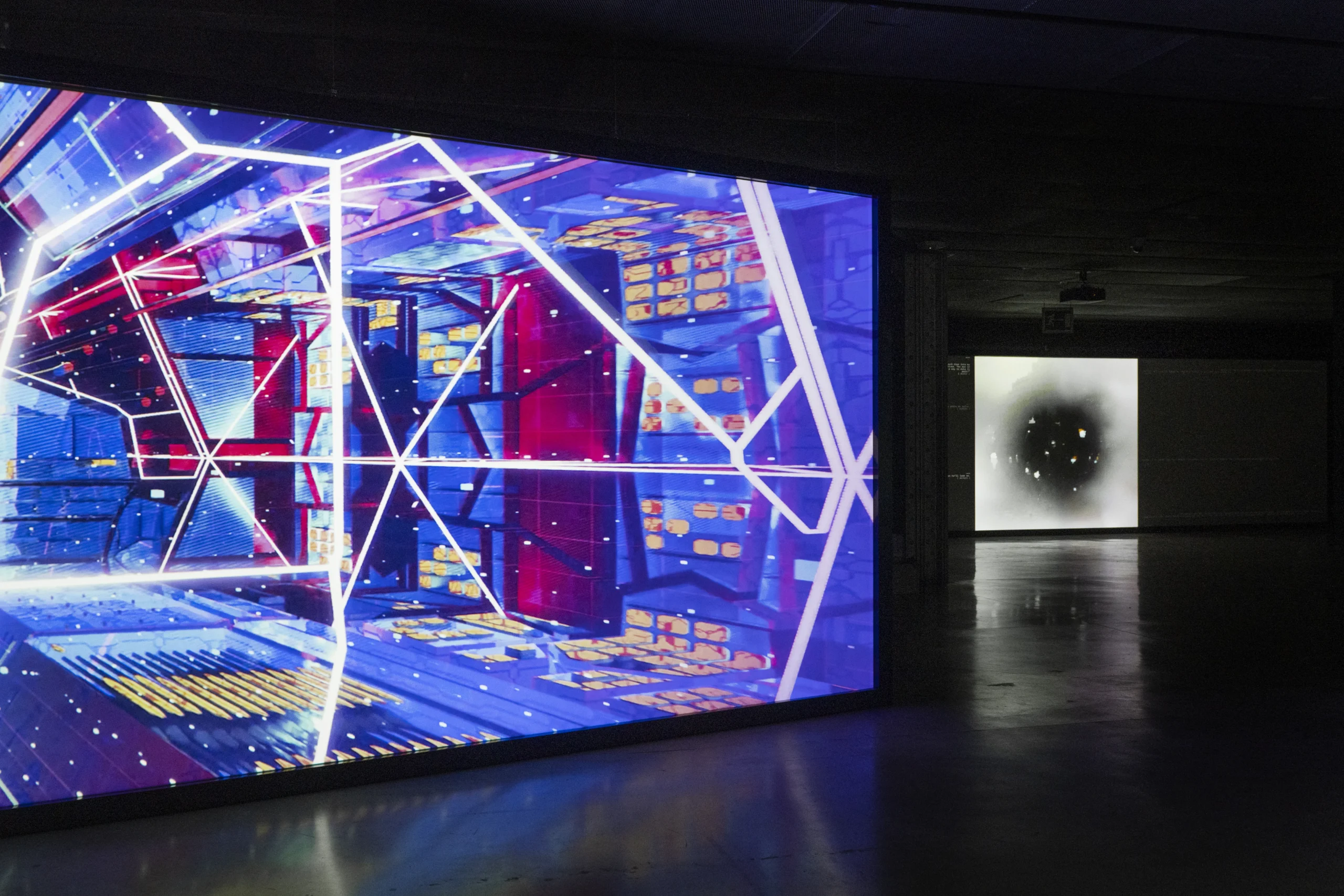
Espacio Fundación Telefónica acoge esta imperdible muestra que invita a imaginar escenarios del mañana, generados por IA, a través de la mirada optimista e inspiradora de seis artistas y colectivos creativos audiovisuales.
Más info
Impulsamos la formación en competencias digitales de las personas mayores para potenciar su autonomía y conectarlas con las oportunidades de la era digital.
Más info